Atualmente, a tecnologia de processamento inteligente e flexível tornou-se a busca e aspiração dos fabricantes de processamento de chapas metálicas de alta qualidade. Portanto, unidades de dobra robótica surgiram neste ambiente de mercado.
Índice
Análise da situação atual da tecnologia de dobra de chapas metálicas
Na indústria de chapas metálicas, a maioria das empresas está atualmente envolvida em processos tradicionais de dobra. No processo de produção, devido à variedade, especificações e pequenos lotes de produtos, múltiplos dobradeira hidráulica máquinas e um grande número de operadores de dobra de chapas qualificados e experientes ainda são necessários para completar a dobra das peças de trabalho.
Porém, no trabalho prático, existem os seguintes problemas:
- Em primeiro lugar, devido ao trabalho prolongado do operador, a resistência não é sustentada, resultando em posições altas e baixas inconsistentes da peça colocada a cada vez.
- Em segundo lugar, os operadores não mantêm a estabilidade como os robôs, pelo que o tamanho e a precisão da dobra da peça dobrada não podem ser garantidos devido à influência manual, resultando na má qualidade do produto acabado.
- Em terceiro lugar, quando se deparam com peças grandes, geralmente são necessários 3-4 operadores para completar o manuseamento e operação, e a dificuldade no recrutamento de trabalhadores e os custos elevados são as dificuldades enfrentadas pelas empresas.
- Em quarto lugar, não é seguro para os operadores trabalhar seguindo o processo de dobra tradicional. Existem riscos de segurança significativos ao levantar peças de trabalho, que podem facilmente levar a acidentes de trabalho.
Hoje em dia, embora a fabricação e a precisão das dobradeiras tenham melhorado muito em comparação com o passado, ainda existe uma lacuna significativa entre os requisitos atuais e a fabricação inteligente.
Em termos de produção inteligente, personalização personalizada, extensão orientada a serviços e colaboração em rede, ainda há necessidade de inovação e desenvolvimento conjuntos no subcampo de fabricação de equipamentos de chapa metálica e no lado da demanda. Esta inovação e promoção da aplicação é mais uma melhoria e libertação de produtividade.
Problemas precisam ser resolvidos na indústria tradicional de dobra de chapas metálicas
A dobra tradicional na indústria de chapas metálicas precisa abordar os seguintes problemas:
- O processo de dobra tradicional é a incapacidade de obter múltiplas variedades, lotes pequenos e troca rápida.
- A dobra de peças de alta precisão na indústria de chapas metálicas apresenta baixa precisão e qualidade instável.
- Os operadores de dobra de chapas metálicas são escassos e a intensidade de trabalho dos trabalhadores é alta.
- Custos de pessoal, riscos de segurança, layout de processos, gestão e operação.
Os problemas acima podem ser resolvidos selecionando unidades de dobra robótica inteligentes, que incluem: CNC pressione o freio máquina, robô de 6 eixos e trilho guia de 7 eixos, estação de alimentação, dispositivo de separação de placa magnética, bancada de posicionamento de pré-alinhamento, mecanismo de inversão de placa, pinça de alimentação, empilhamento de produto acabado, biblioteca de moldes, software de programação offline, software de programação paramétrica, dobra de desenvolvimento secundário software e serviços de extensão.
Composição das unidades de dobra robótica
A prensa dobradeira hidráulica CNC com robôs como componente principal de execução é uma combinação de equipamentos altamente automatizados, que tem as vantagens de alta eficiência, alta qualidade e alta flexibilidade.
Em unidades de máquinas de dobra flexíveis, a seleção de combinações de componentes apropriadas pode fornecer melhor suporte para eficiência e flexibilidade de dobra. A precisão da dobra depende da precisão da própria máquina dobradeira, da precisão de posicionamento do robô dobradeira e do controle colaborativo entre o robô e a máquina dobradeira.
A dificuldade do controle colaborativo reside na correspondência de velocidade entre o robô e a prensa dobradeira, bem como na trajetória de movimento do robô que suporta a peça de trabalho. O mau efeito de acompanhamento afetará seriamente o resultado da formação do ângulo de flexão e o nivelamento da superfície da placa, afetando assim a qualidade do produto acabado.
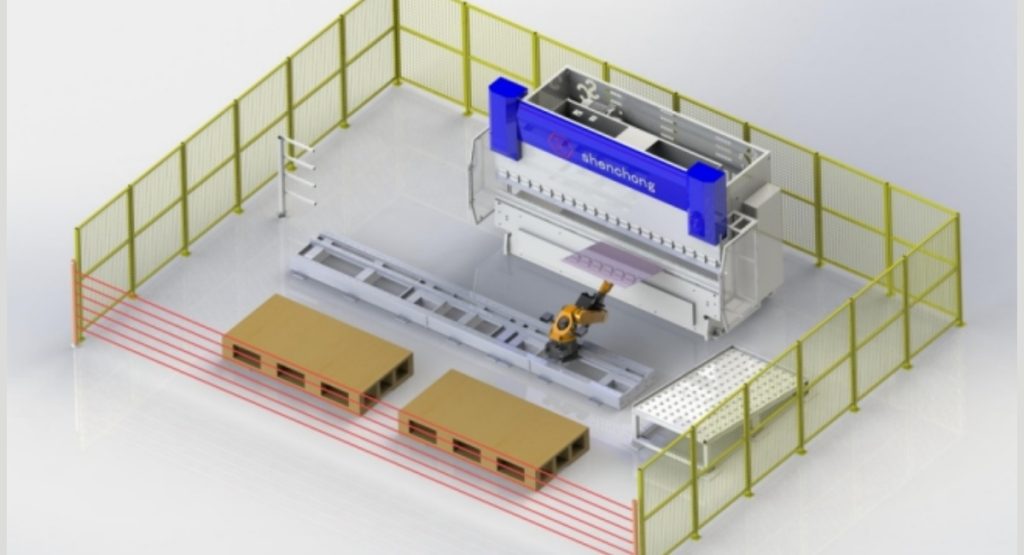
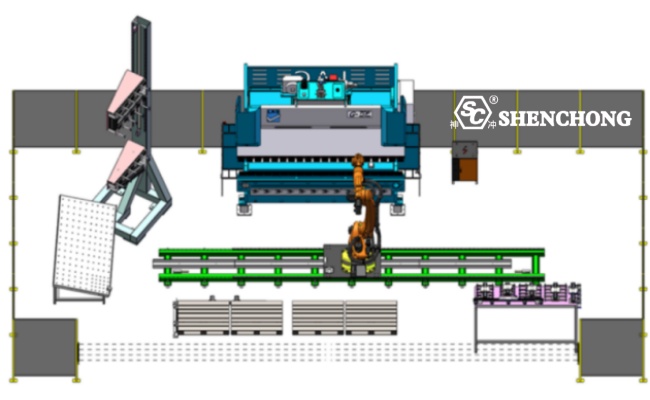
Conforme mostrado na figura abaixo, a unidade de processamento de dobra padrão consiste em um robô e uma prensa dobradeira hidráulica CNC como núcleo, com a pinça, mesa de carga, mesa de descarga, mesa de trabalho de posicionamento, estrutura giratória, dispositivo de troca de garra e vários sensores de detecção como auxiliares componentes.

Partes principais de uma prensa dobradeira robótica
Os punhos são as “mãos” usadas pelos robôs para substituir o trabalho manual e pegar e posicionar peças de trabalho. A garra de um robô dobrador é geralmente composta por múltiplas ventosas instaladas em uma estrutura metálica.
As plataformas de carga e descarga costumam utilizar paletes empilhados, existindo também unidades que utilizam correias transportadoras ou rolos para transportar matérias-primas e produtos acabados. Placas à base de óleo são propensas a aderir, o que pode fazer com que várias placas sejam coletadas ao mesmo tempo. Vários dispositivos de divisão (como dispositivos de divisão magnética) e sensores de detecção podem ser instalados próximos à mesa de alimentação para garantir que as placas agarradas sejam folhas únicas.
A bancada de posicionamento é uma plataforma inclinada com borda bloqueadora, com bolas levemente elevadas distribuídas na superfície da mesa. O robô transfere a placa de aço para a mesa de posicionamento e a placa desliza livremente até a borda devido à gravidade. Devido à posição fixa e à borda da mesa de posicionamento, quando o robô agarra novamente a placa, a posição da placa e da pinça são fixadas com relativa precisão, fornecendo uma referência para a próxima etapa de dobra.
A moldura articulada é uma moldura fixa para um dispositivo de preensão. Quando o robô precisa retirar a peça de trabalho de uma posição diferente, ele pode colocar a peça de trabalho na estrutura giratória para fixá-la e, em seguida, o robô pode agarrar a peça de trabalho na nova posição novamente. Em algumas ocasiões especiais, o molde da dobradeira também pode ser usado para fixar a peça de trabalho e alterar a posição de fixação.
Fluxo de trabalho da unidade de processamento de dobra robótica
O trabalho da unidade de processamento de dobra é dividido principalmente em seis processos: carregamento, coleta, centralização, inversão, dobra e empilhamento.
- Carregamento: Coloque manualmente toda a pilha de placas que precisam ser processadas na plataforma de carregamento e instale um interruptor de detecção de placas na plataforma de carregamento para evitar que o robô agarre a bandeja após todas as placas serem processadas.
- Picking: O robô corre até a posição da mesa de alimentação e detecta a altura da tábua através do sensor ultrassônico instalado na pinça. Com base nos dados de detecção, ele corre automaticamente para a posição apropriada para agarrar a prancha. Depois de agarrar a placa, a espessura da placa é medida através de um dispositivo de medição de espessura para evitar falhas de processamento causadas pela captura de várias folhas de placa de uma só vez. Após passar na medição de espessura, ele está pronto para alinhamento.
- Centralização: O robô corre para a posição da mesa de posicionamento, coloca a chapa metálica na mesa de posicionamento para um posicionamento preciso e, após a conclusão do posicionamento, agarra a chapa novamente e se prepara para dobrar.

- Inversão: Determine se deseja usar um quadro invertido com base nos requisitos do processo. Se necessário, coloque o robô na posição de estrutura giratória, coloque a chapa metálica na estrutura giratória, solte a chapa metálica e evite-a. Após a conclusão da inversão, pegue a chapa de metal.
- Dobra: O robô corre para a posição da dobradeira, alisa a chapa metálica no molde inferior da dobradeira e a localiza com precisão através do sensor de dedo traseiro da dobradeira. Após a conclusão do posicionamento, o robô envia um sinal de dobra para a prensa dobradeira CNC e coopera com a máquina dobradeira para concluir a ação de dobra para determinar se ela precisa ser dobrada novamente e decidir se deve continuar dobrando. A dobra é um elo fundamental, e a dificuldade técnica da dobra está na ação coordenada entre o robô e a dobradeira, ou seja, na dobra seguinte. Quando o robô fixa ou suporta a dobra da chapa metálica, a chapa metálica se deforma e o robô precisa seguir a chapa metálica em um movimento de arco circular de acordo com um algoritmo de trajetória específico e sempre manter uma posição relativamente fixa com a chapa metálica .
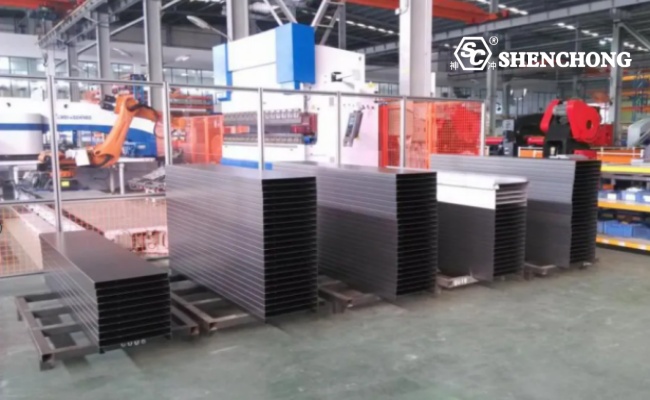
- Empilhamento: Quando o robô corre para a posição da mesa de descarga, há várias ações do processo de empilhamento devido às diferenças na formação da peça, como empilhamento de matriz convencional, empilhamento cruzado de camada única e dupla e empilhamento de intertravamento direto e reverso.
Características técnicas das unidades de dobra robótica
Design e desenvolvimento
A pesquisa e desenvolvimento do projeto de dobra de robôs concentra-se nas necessidades personalizadas e na customização dos usuários, tendo as necessidades e objetivos do cliente como prioridade máxima. Os fabricantes de robôs de dobra são obrigados a alcançar o seguinte antes de especificar uma solução de robô de dobra:
- Realizar intercâmbios técnicos detalhados com os clientes no desenvolvimento de cada solução técnica
- Realize análises de simulação computacional nos desenhos de processamento da peça fornecidos pelo cliente
- Realize testes de amostra no local em peças típicas do cliente
- Classifique e analise peças de trabalho do cliente e dados de processo.
Após a confirmação da conclusão dos trabalhos processuais acima, será formulado o plano técnico. Após a aprovação do plano técnico e dos desenhos do plano pelo cliente, será realizado um projeto abrangente.
A unidade de dobra robótica SC adota design 3D avançado em termos de materiais, estrutura, sensores, compensação em tempo real, acompanhamento, medição de ângulo a laser, troca automática de molde, troca automática de pinça, software e controle, programação paramétrica, programação offline, gerenciamento de produção software e tecnologia de controle de barramento, todos os quais adotam e usam software e hardware de marcas internacionais de primeira classe. Em termos de projeto do corpo da dobradeira, foram utilizados os softwares e métodos de projeto mais avançados do mundo para análise de mecânica estrutural. Com anos de experiência em projeto e compreensão das características estruturais da estrutura da máquina de dobra, a análise de elementos finitos foi conduzida em cada ponto de força para obter análise mecânica do ombro lateral, travessa superior, travessa inferior e travessa inferior da máquina de dobra, totalmente garantindo a racionalidade, confiabilidade e estabilidade do projeto da máquina-ferramenta.
O projeto da unidade de dobra robótica visa alcançar conceitos de produtos inteligentes usando as mais recentes tecnologias (software, hardware) para troca de dados em tempo real, compensação e rastreamento de dobra durante o processo de produção. Os principais problemas resolvidos e os resultados alcançados são:
(1) Resolveu as dificuldades do processo de produção de chapas metálicas personalizadas e resolveu o problema de troca rápida de produção de vários produtos, lotes pequenos (5 a 10 peças) e peças de várias variedades na indústria de elevadores.
(2) Resolveu os problemas de qualidade instável do produto, baixa precisão das peças e baixa consistência do produto.
(3) Resolveu os problemas de baixa eficiência de produção, layout de produção e rota de processo irracionais.
(4) Resolveu os problemas de recrutamento difícil, altos custos trabalhistas e alta intensidade de trabalho na dobra manual.
(5) Maior precisão e automação de dobra, recursos aprimorados de fabricação inteligente da empresa e melhorado o efeito visual das visitas aos clientes.
Tecnologia de acompanhamento de dobra
Durante o processo de dobra, as unidades de dobra robótica SC podem seguir e ajustar automaticamente peças de trabalho de diferentes tamanhos e espessuras de chapa de acordo com a velocidade de operação do controle deslizante da máquina com freio de dobra. Esta tecnologia é implementada pelo pacote de software de aplicação de dobra robótica especializado SC SHENCHONG.
Tecnologia de medição de ângulo a laser
O sistema de medição de ângulo AMS usa um sistema de medição on-line de ângulo a laser de circuito fechado. Durante o processo de dobra automática do robô, o programa de aplicação automática do AMS e o sistema automático de medição de ângulo com dispositivo de medição de ângulo a laser integrado trabalham em conjunto com o sistema SHENCHONG para garantir a precisão do ângulo de dobra. Suas principais características são:
(1) Detectando o ângulo de flexão da peça de trabalho após o rebote através do laser online.
(2) O sistema de detecção de força calcula automaticamente o valor do rebote de flexão.
(3) A profundidade da peça pode ser ajustada automaticamente de acordo com a largura do molde inferior.
(4) Através de um sistema de medição on-line de ângulo de laser de circuito fechado, o rendimento de flexão é garantido para atingir mais de 99,5%.
Troca automática de pinças do robô (ATC) e troca de ferramentas de freio de prensa
Garra Robot Automatic (ATC) e ferramentas de freio de imprensa A mudança é um método de operação totalmente inteligente e automatizado no campo de chapas metálicas, que consiste em software de troca automática de moldes, robôs e bibliotecas de moldes. Quando equipado com um sistema automático de troca de molde, o centro de dobra de precisão pode dobrar automática e aleatoriamente pequenos lotes de produtos diferentes. Ao utilizar a função de substituição automática do molde, o molde na dobradeira não é mais um fator limitante e pode ser processado por pessoal não tripulado durante todo o processo. A pinça do dispositivo mecânico automático do robô pode substituir o molde muito rapidamente e dobrar o próximo lote de componentes a qualquer momento.

Software de troca automática de ferramentas de prensa dobradeira
As principais características do software de troca automática de moldes são:
(1) Através da interface gráfica do anexo, os usuários podem ver imediatamente o status atual de todo o sistema. No lado direito da interface, existe um gráfico representando o estado dos moldes, que particiona as posições atuais desses moldes.
(2) Toda a interface inclui a área de punção superior de dobra, a área de matriz inferior de dobra e a biblioteca de moldes. A exibição do molde segue o tamanho do próprio molde e a posição da estação de trabalho fixada.
(3) Distinguir os moldes superior e inferior com cores diferentes. No canto superior esquerdo da interface, há uma descrição detalhada do molde instalado na dobradeira. Duas partes: uma é explicar o molde superior e a outra é explicar o molde inferior, descrevendo o molde fixado através de códigos de identificação e posições existentes.
Tecnologia de dobra sequencial CNC
A tecnologia de dobra sequencial CNC é um sistema de controle de dobra de alta precisão adequado para usinar peças com requisitos de forma e tolerâncias de posição. O dispositivo consiste em um conjunto de dois conjuntos de sistemas operacionais de dispositivos de impulso frontal CNC com esteiras. O deslocamento é transmitido e realimentado por sensores, e toda a operação é controlada pelo sistema CNC. O eixo de controle é composto por X3\X4 e Z3\Z4. Ao configurar um dispositivo CNC de deslocamento frontal e um batente traseiro para dobra, mesmo que o tamanho da peça atinja ± 1 mm, ele pode facilmente garantir que as principais dimensões estejam dentro de erros controláveis, melhorando a precisão e a eficiência da peça.
Software e controle
Nas unidades de dobra robótica, aplicamos software de programação paramétrica, software de programação offline e software de gerenciamento de produção. Ao mesmo tempo, desenvolvemos acompanhamento de dobra secundária, troca automática de molde, troca automática de pinça, empilhamento flexível, compensação em tempo real, busca de borda de placa, tecnologia de inversão flexível e tecnologia de controle de barramento. Ele pode atender perfeitamente às necessidades técnicas e de software de vários clientes para dobra de chapas metálicas.
Problemas e soluções de dobra robótica
Quando usamos prensa dobradeira robótica para dobra de chapas metálicas, podemos encontrar alguns pequenos problemas que não sabemos como resolver ou evitar. Abaixo, SC SHENCHONG compilou cinco problemas aos quais os robôs são propensos e forneceu as soluções correspondentes.
Depois de achatar a borda longa, há um levantamento.
Análise da causa: Devido à borda mais longa que precisa ser achatada, ela não é pressionada com força durante o achatamento, fazendo com que a extremidade fique achatada e depois empenada. Esta situação está intimamente relacionada à posição achatada, por isso é importante prestar atenção à posição achatada durante o achatamento.
- Antes de dobrar, dobre primeiro o canto e depois alise-o.
- Achatamento passo a passo: Primeiro pressione a extremidade para dobrar a borda achatada para baixo. Achate a base.
Ao alterar as ferramentas da prensa dobradeira, as dimensões de usinagem serão alteradas.
Análise da causa: Devido à força de compressão para frente na peça de trabalho durante o processo de usinagem, a peça de trabalho se move para frente, resultando em um aumento na pequena dimensão do ângulo de inclinação L na frente.
Solução:
- Elimine as áreas sombreadas da imagem. Normalmente, compensamos tanto quanto há diferença.
- Desbaste todas as peças de autoposicionamento do molde fácil e use um medidor fixo para posicionamento.
O tamanho total do material de corte (referente ao desdobramento) é muito pequeno ou muito grande, o que não corresponde à superfície circular.
Análise de causa:
- Erro de implantação de engenharia.
- O tamanho do corte está incorreto.
Solução:
Com base na direção do desvio, no valor total do desvio ascendente e no número de ferramentas de dobra, calcule a alocação para cada dobra. Se a tolerância de alocação calculada estiver dentro da faixa de tolerância, a peça será aceitável.
Se o tamanho for muito grande, pequenas ranhuras em V podem ser usadas para processamento.
Se o tamanho for muito pequeno, uma ranhura em V grande pode ser usada para processamento.
Depois que o robô de dobra faz furos e engata o encaixe e a espiga, ele se expande ou racha, ou o encaixe e a espiga não se ajustam firmemente, resultando em deformação.
Análise de causa:
- A razão pela qual o encaixe não está estanque é devido à expansão inadequada do furo.
- A deformação é causada pelo desalinhamento do furo ou pelo método incorreto de encaixe e junta de espiga.
Solução:
- Escolha um punção com um ângulo R grande e preste atenção às rebarbas ao redor do furo ao puxar e virar.
- Aumente a pressão no buraco da salada, aprofunde-o e use um punção grande em ângulo R.
- Altere o método de junta de encaixe e as razões para o desalinhamento do furo.
Conclusão
Com a melhoria geral da indústria mecânica, a indústria de fabricação de chapas metálicas terá um novo nível de requisitos para equipamentos de produção. No final, os dispositivos que podem ajudar os usuários a resolver problemas serão preferidos pelos usuários. A unidade de dobra robótica SC possui um método de produção adequado para os clientes, a melhor combinação de hardware e software e é adequada para clientes com múltiplas variedades, pequenos lotes, troca rápida e sem necessidade de produção experimental da primeira peça.